
در نمایندگی زیمنس مطابق دیاگرام مربوط به FB1 از بلوک های استاندارد زمینه مربوط به کنترل PID مطابق گراف از سمت چپ بالا اولین ورودی به نام ورودی SP_INT (Setpoint Internal) به صورت داخلی و نرم افزاری می باشد که همان مقدار اولیه است ، یک عدد Real به صورت 0 تا 100 درصد که بر اساس این عدد تعریف می کنیم خروجی روی چه عددی تنظیم شود. مطابق گراف خواهیم دید. SP_INT وارد یک جمع کننده با علامت + می شود. از طرف دیگر نیز باید فیدبک وارد شود. با علامت منفی که خواهیم دید ، ورودی دیگر از دو طریق می تواند وارد شود :
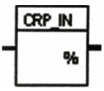
در روش اول از PV_IN استفاده می شود. سیگنال فیدبک در برنامه بین حدود دلخواه Scale شده و خروجی آن به این ورودی داده می شود. فرض کنید برای کنترل فشار یک مخزن ترانسمیتر فشار بین 0 تا 40 اتمسفر کالیبره شده و اپراتور نیز نیز مقدار مبنا (SP) را بر حسب اتمسفر وارد می کند. در این شرایط ، سیگنال ترانسمیتر را توسط FC105 ، Scale کرده نتیجه Scale را به ورودی PV_IN می دهیم.
در روش دوم از PV_PER استفاده می شود و مستقیماً آدرس سیگنال فیدبک آنالوگ به این ورودی داده می شود ( مانند PIW512) در این شرایط PB41 بصورت داخلی سیگنال دریافتی از PV_PER را بین 0 تا 100 درصد ، Scale می کند. این در شرایطی مفید است که حدود 0 تا 100 برای PV و SP مورد نظر باشد. در این حالت ، نیازی به استفاده از FC105 نخواهد بود.
در اتوماسیون زیمنس بعد از آن به یک بلاک نرمالیزه کننده می رسد که دو پارامتر به نام های (PV offset) PV-OFF و (Procesvalu factor) PV-FAC از ما می گیرد. در واقع ، در این بلاک INT پس از تبدیل به Real دربازه 0 تا 100% در یک ضریب به عنوان PV-FAC ضریب شده و با یک Offset با عنوان PV-Offset جمع می شود. می توان گفت که این همان معادله خطی است که براساس آن برنامه ای نوشته شده و دقیقاً این قسمت از بلاک عملیات ضرب و جمع مربوط به معادله خط را انجام می دهد. به عبارت دیگر ، برای نوشتن معادله خطی آن یک شیب خط داشتیم و یک Offset ، بجای اینکه اجازه دهد مینیمم و ماکزیمم را ما تعریف کنیم ، خود بلاک بین 0 تا 100% تعریف کرده است. از طرف دیگر ، یک شیب خط به نام Factor و یک دامنه به نام Offset در اختیار ما قرار داده و این دو را به صورت آزاد قرار داده است که ما بتوانیم به صورت آزاد آنها را تغییر دهیم. بنابراین ، مقدار بدست آمده را در عدد Factor ضرب نموده و با عدد Offset جمع می کند. دقت کنید که PV_FAC و PV_OFF هر دو Real هستند.
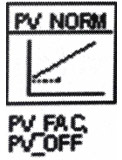
در ادامه ، خروجی آن به یک پایه کلید Selector به نام PVPER_On می رود که این خود نیز یکی از ورودی های بلاک می باشد ، مانند ورودی Bipolar که در بلوک Scale عمل می کند و ورودی بیتی را می توان به آن اختصاص داد. اگر این بیت 1 شود ، سطر پایین را انتخاب می کند یعنی PV_PER و اگر صفر شود PV_IN را انتخاب می کند. به طور پیش فرض نیز 0 انتخاب شده است ، بنابراین اگر متغیری به آن نسبت ندهیم ، به طور اتوماتیک PV_IN را انتخاب می کند.

در ادامه ، به این نتیجه می رسیم که Set point و PV اتوماسیون زیمنس از یکدیگر کم می شوند و خطا ساخته می شود.
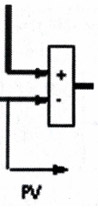
منظور از اینکه ورودی مرجع ، خروجی مطلوب ماست ، این است که در یک سیستم کنترل انتظار داریم خروجی سیستم به همان مقداری برسد که ما در مرجع برای سیستم انتخاب کرده بودیم.
اگر دقت کنیم ، در بسیاری از موارد ، مشکلی در سیستم ها یا پروسه ها وجود دارد که نمی تواند یک عدد به صورت ثابت قرار گیرد ( لخت است ) یا به اصطلاح ، از حول محور خود بالا و پائین می رود ، مثلاً یک Proportional Valve مرتباً ضربه می زند یا می لرزد یا کم و زیاد می شود و یا حول Setpoint نمایندگی زیمنس بازی می کند. این در اثر نوساناتی است که با PID نمی توانیم آن را از بین ببریم و خود به خود وجود دارد ، ولی اگر بخواهیم ایم نوسانات را بگیریم ، باید آن را فیلتر کنیم. کار بلاک بعدی به نام Dead Band می باشد و یا فیلتر Dead Band و پارامتری که در زیر آن می بینیم و می تواند مقدار بگیرد. به عبارت دیگر ، در این پایه مقدار هیسترزیس وارد می شود. اگر عدد 1 به آن اختصاص بدهیم ، بین -/+1 مقدار را گرد می کند و یا اگر 2 بدهیم ، -/+2 اعمال می کند. این وضعیت را بر روی گرافی که وسط این بلوک کشیده است ، مشاهده می کنید.
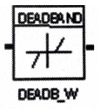
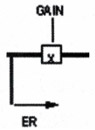
حال ، با گذشت از فیلتر Dead Band ، Error واقعی را داریم که در یک پایه خروجی به نام ER یا Error در اختیار ما می گذارد. در این خروجی ، می توانیم خطا را ببینیم و به همین صورت وارد یک ضرب کننده می شود که در Gain ضرب می شود. این Gain همان ضریب P است که به صورت یک عدد Real وارد می شود.

مسیر بالایی که P-SEL اتوماسیون زیمنس آن را کنترل می کند ، همان مسیر Proportional است. چون قبلاً Error در Gain ضرب شده ، این مسیر دیگر مستقیم است و چیزی برای ضرب شدن ندارد و می توان گفت PV قبلاً اعمال شده است.
مسیر بعدی ، مسیر انتگرال گیر است و از آن مقدار خطایی که در Gain ضرب شده انتگرال می گیرد و یا تاریخچه خطا را محاسبه می کند که باز ورودی TI و چند پارامتر دیگر را می گیرد. در واقع ، پارامتر TI همان ضریب I یا انتگرال گیر می باشد ، اما عدد بر حسب زمان (Time) یا زمان انتگرال گیری است.
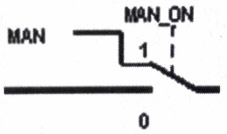
مقدار بدست آمده به طرف یک Selector Switch به نام MAN-ON نمایندگی زیمنس که این نیز یک ورودی لاجیک یا بیتی از بلاک بوده و می تواند 0 تا 1 باشد ، حرکت می کند. پیش فرض آن 1 می باشد. اگر وضعیت این سوئیچ 0 باشد ، کنترل Close Loop داریم ، یعنی مواردی که تا کنون محاسبه شده ، ادامه می یابد تا به موتور ، ولو ، هیتر و... اعمال شود ، ولی اگر در وضعیت 1 باشد ، تمام این محاسبات بی فایده است ، زیرا مقدار آن را از یک ورودی با عنوان MAN-ON می گیرد. این ورودی همان ورودی کنترل حلقه باز می باشد. بنابراین ، این Selector Switch تعیین می کند که کنترل حلقه بسته یا حلقه باز داشته باشیم.
با یکی از این دو روش ، فرمان ساخته می شود و وارد بلاک بعدی می شود که یک بلاک محدود کننده به نام LMNLIMIT است.
در روش اول از PV_IN استفاده می شود. سیگنال فیدبک در برنامه بین حدود دلخواه Scale شده و خروجی آن به این ورودی داده می شود. فرض کنید برای کنترل فشار یک مخزن ترانسمیتر فشار بین 0 تا 40 اتمسفر کالیبره شده و اپراتور نیز نیز مقدار مبنا (SP) را بر حسب اتمسفر وارد می کند. در این شرایط ، سیگنال ترانسمیتر را توسط FC105 ، Scale کرده نتیجه Scale را به ورودی PV_IN می دهیم.
در روش دوم از PV_PER استفاده می شود و مستقیماً آدرس سیگنال فیدبک آنالوگ به این ورودی داده می شود ( مانند PIW512) در این شرایط PB41 بصورت داخلی سیگنال دریافتی از PV_PER را بین 0 تا 100 درصد ، Scale می کند. این در شرایطی مفید است که حدود 0 تا 100 برای PV و SP مورد نظر باشد. در این حالت ، نیازی به استفاده از FC105 نخواهد بود.
در اتوماسیون زیمنس بعد از آن به یک بلاک نرمالیزه کننده می رسد که دو پارامتر به نام های (PV offset) PV-OFF و (Procesvalu factor) PV-FAC از ما می گیرد. در واقع ، در این بلاک INT پس از تبدیل به Real دربازه 0 تا 100% در یک ضریب به عنوان PV-FAC ضریب شده و با یک Offset با عنوان PV-Offset جمع می شود. می توان گفت که این همان معادله خطی است که براساس آن برنامه ای نوشته شده و دقیقاً این قسمت از بلاک عملیات ضرب و جمع مربوط به معادله خط را انجام می دهد. به عبارت دیگر ، برای نوشتن معادله خطی آن یک شیب خط داشتیم و یک Offset ، بجای اینکه اجازه دهد مینیمم و ماکزیمم را ما تعریف کنیم ، خود بلاک بین 0 تا 100% تعریف کرده است. از طرف دیگر ، یک شیب خط به نام Factor و یک دامنه به نام Offset در اختیار ما قرار داده و این دو را به صورت آزاد قرار داده است که ما بتوانیم به صورت آزاد آنها را تغییر دهیم. بنابراین ، مقدار بدست آمده را در عدد Factor ضرب نموده و با عدد Offset جمع می کند. دقت کنید که PV_FAC و PV_OFF هر دو Real هستند.
در ادامه ، خروجی آن به یک پایه کلید Selector به نام PVPER_On می رود که این خود نیز یکی از ورودی های بلاک می باشد ، مانند ورودی Bipolar که در بلوک Scale عمل می کند و ورودی بیتی را می توان به آن اختصاص داد. اگر این بیت 1 شود ، سطر پایین را انتخاب می کند یعنی PV_PER و اگر صفر شود PV_IN را انتخاب می کند. به طور پیش فرض نیز 0 انتخاب شده است ، بنابراین اگر متغیری به آن نسبت ندهیم ، به طور اتوماتیک PV_IN را انتخاب می کند.
در ادامه ، به این نتیجه می رسیم که Set point و PV اتوماسیون زیمنس از یکدیگر کم می شوند و خطا ساخته می شود.
منظور از اینکه ورودی مرجع ، خروجی مطلوب ماست ، این است که در یک سیستم کنترل انتظار داریم خروجی سیستم به همان مقداری برسد که ما در مرجع برای سیستم انتخاب کرده بودیم.
اگر دقت کنیم ، در بسیاری از موارد ، مشکلی در سیستم ها یا پروسه ها وجود دارد که نمی تواند یک عدد به صورت ثابت قرار گیرد ( لخت است ) یا به اصطلاح ، از حول محور خود بالا و پائین می رود ، مثلاً یک Proportional Valve مرتباً ضربه می زند یا می لرزد یا کم و زیاد می شود و یا حول Setpoint نمایندگی زیمنس بازی می کند. این در اثر نوساناتی است که با PID نمی توانیم آن را از بین ببریم و خود به خود وجود دارد ، ولی اگر بخواهیم ایم نوسانات را بگیریم ، باید آن را فیلتر کنیم. کار بلاک بعدی به نام Dead Band می باشد و یا فیلتر Dead Band و پارامتری که در زیر آن می بینیم و می تواند مقدار بگیرد. به عبارت دیگر ، در این پایه مقدار هیسترزیس وارد می شود. اگر عدد 1 به آن اختصاص بدهیم ، بین -/+1 مقدار را گرد می کند و یا اگر 2 بدهیم ، -/+2 اعمال می کند. این وضعیت را بر روی گرافی که وسط این بلوک کشیده است ، مشاهده می کنید.
حال ، با گذشت از فیلتر Dead Band ، Error واقعی را داریم که در یک پایه خروجی به نام ER یا Error در اختیار ما می گذارد. در این خروجی ، می توانیم خطا را ببینیم و به همین صورت وارد یک ضرب کننده می شود که در Gain ضرب می شود. این Gain همان ضریب P است که به صورت یک عدد Real وارد می شود.
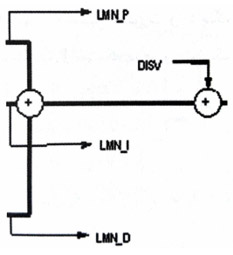
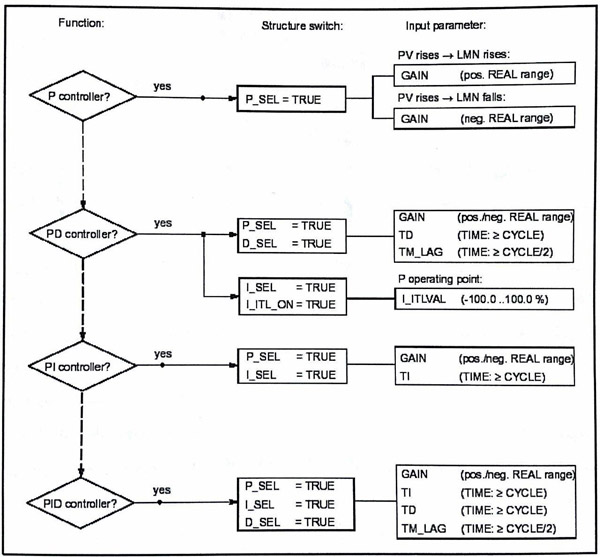
بعد از اینکه در Gain ضرب شد ، وارد سه مسیر مختلف می شود. این سه مسیر هر کدام یک Selector Switch دو وضعیتی به نام های P-SEL یا I-SEL , P-Select و D-SEL دارند این سه ورودی لاجیک یا بیتی هستند که با صفر و یک شدن انتخاب می کنند که I , P یا D یا حتی ترکیبی از این ها را داشته باشیم. به کمک این کلید ها می توانیم کنترلر های PD,PI,P یا حتی PID را بسازیم.
مسیر بالایی که P-SEL اتوماسیون زیمنس آن را کنترل می کند ، همان مسیر Proportional است. چون قبلاً Error در Gain ضرب شده ، این مسیر دیگر مستقیم است و چیزی برای ضرب شدن ندارد و می توان گفت PV قبلاً اعمال شده است.
مسیر بعدی ، مسیر انتگرال گیر است و از آن مقدار خطایی که در Gain ضرب شده انتگرال می گیرد و یا تاریخچه خطا را محاسبه می کند که باز ورودی TI و چند پارامتر دیگر را می گیرد. در واقع ، پارامتر TI همان ضریب I یا انتگرال گیر می باشد ، اما عدد بر حسب زمان (Time) یا زمان انتگرال گیری است.
شاخه پایین تر مشتق گیر بوده و یکی از پارامتر هایی که می گیرد TD ضریب مشتق گیر که آن نیز به صورت زمان است ، نهایتاً هر کدام از این فرمان ها که ساخته می شوند (P,I,D) داخل یک خروجی با عنوان LMN-D , LMN-I , LMN-P یا Manipulated Value به صورت جداگانه تحویل می دهد و می توانیم از آنها استفاده کنیم. در ادامه ، این سه فرمان را با یکدیگر جمع کرده و به سمت جمع کننده ی بعدی حرکت می کند.
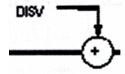
جمع کننده ی بعدی یک ضریب اغتشاش ثابت یا متغیر را با آن جمع می کند. فرض کنید منبع آبی که در حال کنترل آن هستیم ، به طور دائم دارای ورودی ثابتی است ، یعنی به عنوان مثال : مرتباً 10 لیتر بر دقیقه آب سرد وارد منبع می شود و به عبارت دیگر ، همیشه این آب سرد وارد می شود. این یک اغتشاش ثابت می باشد که دما را از Setpoint خود به طور ثابت دور می کند. حال اگر این را به عنوان ضریب اغتشاش به کنترلر وارد کنیم ، این مقدار را نیز جبران می کند ( جمع کننده با عنوان DISV یا Disturbance Variable به معنای اغتشاش )
لازم به ذکر است که اگر اغتشاش به صورت موقتی باشد ، خود کنترلر آن را اصلاح می کند ولی اگر یک اغتشاش ثابت وارد شود ، می توان از این طریق مقدار ثابت را با فرمان بدست آمده جمع کرد. این مقدار به طور ثابت با مقدار ما جمع شود. بعلاوه ، این خروجی در لوپ Feed Forward نیز استفاده می شود.
جمع کننده ی بعدی یک ضریب اغتشاش ثابت یا متغیر را با آن جمع می کند. فرض کنید منبع آبی که در حال کنترل آن هستیم ، به طور دائم دارای ورودی ثابتی است ، یعنی به عنوان مثال : مرتباً 10 لیتر بر دقیقه آب سرد وارد منبع می شود و به عبارت دیگر ، همیشه این آب سرد وارد می شود. این یک اغتشاش ثابت می باشد که دما را از Setpoint خود به طور ثابت دور می کند. حال اگر این را به عنوان ضریب اغتشاش به کنترلر وارد کنیم ، این مقدار را نیز جبران می کند ( جمع کننده با عنوان DISV یا Disturbance Variable به معنای اغتشاش )
لازم به ذکر است که اگر اغتشاش به صورت موقتی باشد ، خود کنترلر آن را اصلاح می کند ولی اگر یک اغتشاش ثابت وارد شود ، می توان از این طریق مقدار ثابت را با فرمان بدست آمده جمع کرد. این مقدار به طور ثابت با مقدار ما جمع شود. بعلاوه ، این خروجی در لوپ Feed Forward نیز استفاده می شود.
مقدار بدست آمده به طرف یک Selector Switch به نام MAN-ON نمایندگی زیمنس که این نیز یک ورودی لاجیک یا بیتی از بلاک بوده و می تواند 0 تا 1 باشد ، حرکت می کند. پیش فرض آن 1 می باشد. اگر وضعیت این سوئیچ 0 باشد ، کنترل Close Loop داریم ، یعنی مواردی که تا کنون محاسبه شده ، ادامه می یابد تا به موتور ، ولو ، هیتر و... اعمال شود ، ولی اگر در وضعیت 1 باشد ، تمام این محاسبات بی فایده است ، زیرا مقدار آن را از یک ورودی با عنوان MAN-ON می گیرد. این ورودی همان ورودی کنترل حلقه باز می باشد. بنابراین ، این Selector Switch تعیین می کند که کنترل حلقه بسته یا حلقه باز داشته باشیم.
با یکی از این دو روش ، فرمان ساخته می شود و وارد بلاک بعدی می شود که یک بلاک محدود کننده به نام LMNLIMIT است.
فرمان ساخته شده ممکن است بخواهد دمای هیتر را تا 100% افزایش دهد ، ولی میدانیم که اگر دمای هیترها تا 100% افزایش یابد ، آسیب می بیند ؛ بنابراین می¬توان فرمان تولید شده را در بازه ی تعیین شده ای محدود کرد بعنوان مثال : از این سطح بالاتر و پائین تر نرود.
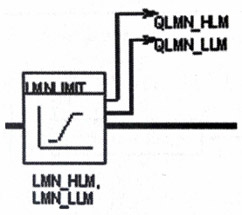
این بلاک دو ورودی به نام های LMN_LLM و LMN_HLM دارد که اگر به آنها مقدار بدهیم ، فرمان ساخته شده در این بازه محدود خواهد شد و اگر هم زمانی به هر کدام از این لیمیت ها برسد (Low,High) یک خروجی بیتی که به صورت دو فلش نود درجه بالای بلاک نشان داده است ، به ما می دهد. اگر به وضعیت High و یا Low برسد ، یکی از این دو خروجی فعال می شود که نشان می دهد به کدام یک از سطوح رسیده است (Low , High)
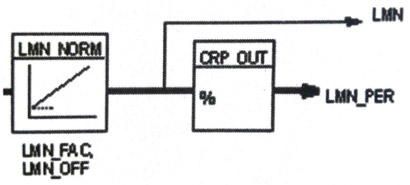
پس از آن فرمان محدود شده وارد یک بلاک نرمالیزه کننده می شود که مانند همان نرمالیزه کننده ی اولی عمل می کند و دارای پارامتر های LMN_FAC و LMN_OFF می باشد. توسط این بلاک می توانیم فرمان نهایی را در ضریبی ضرب کنیم و با یک عدد جمع کنیم ( شیب خط و Offset ) پس از آن مقدار خروجی این بلاک به دو مسیر می رود اولی حاصل نهایی را مستقیماً خارج می کند و یک عدد به فرم Real به ما می دهد که باید آن را از طریق FC106 به خروجی بدهیم LMN_PER از یک Unscale بین 0 تا 100% بصورت داخلی ساخته شده و مستقیماً به آنالوگ خروجی مانند PQW512 متصل می-شود.
این بلاک دو ورودی به نام های LMN_LLM و LMN_HLM دارد که اگر به آنها مقدار بدهیم ، فرمان ساخته شده در این بازه محدود خواهد شد و اگر هم زمانی به هر کدام از این لیمیت ها برسد (Low,High) یک خروجی بیتی که به صورت دو فلش نود درجه بالای بلاک نشان داده است ، به ما می دهد. اگر به وضعیت High و یا Low برسد ، یکی از این دو خروجی فعال می شود که نشان می دهد به کدام یک از سطوح رسیده است (Low , High)
پس از آن فرمان محدود شده وارد یک بلاک نرمالیزه کننده می شود که مانند همان نرمالیزه کننده ی اولی عمل می کند و دارای پارامتر های LMN_FAC و LMN_OFF می باشد. توسط این بلاک می توانیم فرمان نهایی را در ضریبی ضرب کنیم و با یک عدد جمع کنیم ( شیب خط و Offset ) پس از آن مقدار خروجی این بلاک به دو مسیر می رود اولی حاصل نهایی را مستقیماً خارج می کند و یک عدد به فرم Real به ما می دهد که باید آن را از طریق FC106 به خروجی بدهیم LMN_PER از یک Unscale بین 0 تا 100% بصورت داخلی ساخته شده و مستقیماً به آنالوگ خروجی مانند PQW512 متصل می-شود.
فلوچارت شکل زیر می تواند راهنمایی برای انتخاب پارامتر های PID باشد :